About me

· 한성과학고등학교 조기졸업
· 포항공과대학교 기계공학과 졸업
· 토익 895
· 토익스피킹 Level 7
· 이노베이션 스퀘어 인공지능 코스 수료
· 자율주행 데브코스 1기 수료
· 자율주행 데브코스 2기 멘토로 활동 중
#Python #ROS #OpenCV #Pytorch
프로그래머스 이력서· 한성과학고등학교 조기졸업
· 포항공과대학교 기계공학과 졸업
· 토익 895
· 토익스피킹 Level 7
· 이노베이션 스퀘어 인공지능 코스 수료
· 자율주행 데브코스 1기 수료
· 자율주행 데브코스 2기 멘토로 활동 중
#Python #ROS #OpenCV #Pytorch
프로그래머스 이력서 어안렌즈 카메라부터 이미지를 받아 컴퓨터 비전을 이용하여 차선의 위치를 인지하고 이를 바탕으로 조향 값과 속력 값을 제어하여 차선이탈 없이 3바퀴를 완주
· ROS
· OpenCV
· Houghman Transform
· Stanley method
· Lidar sensor

초음파센서를 이용하여 벽과 장애물을 인식하고 알고리즘 및 딥러닝을 통해 벽에 충돌하지 않고 주행하면서 물체 인식 및 주차 미션을 수행
· Ultrasonic sensor
· DQN
· YOLO v2
· AR/QR tag

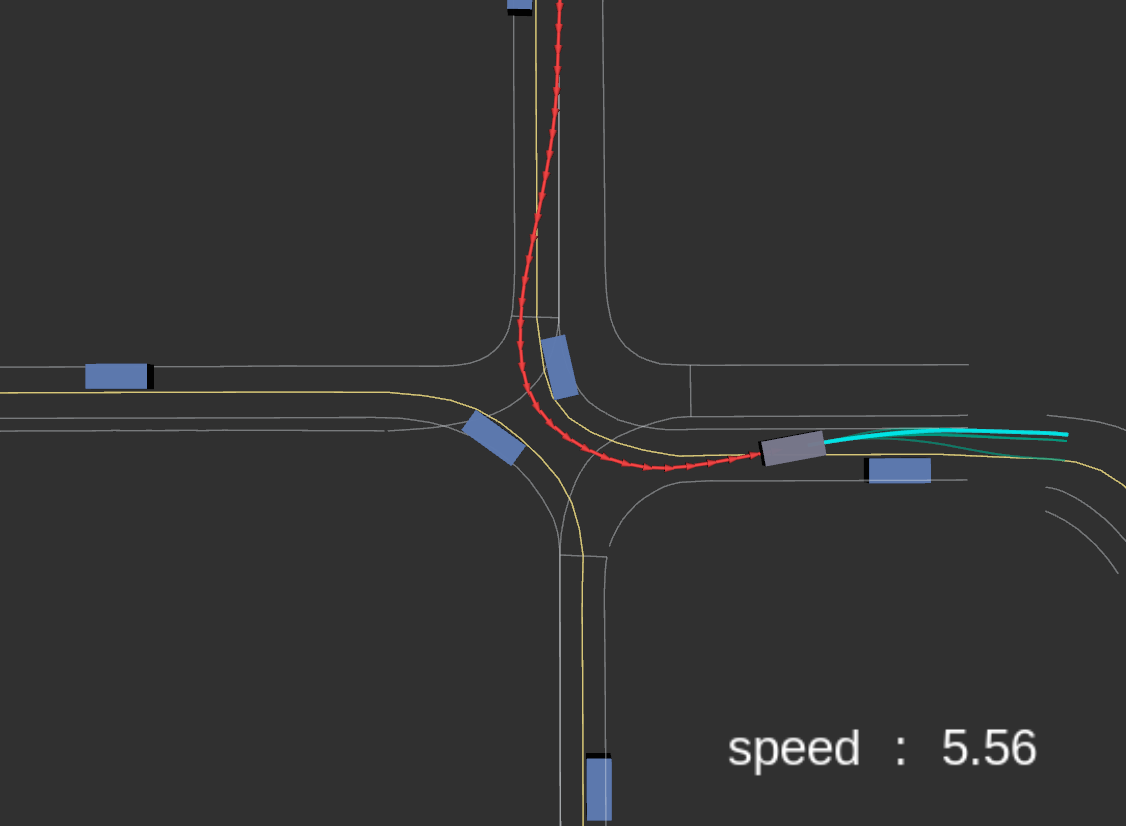
Optimal Frenet path planning 알고리즘을 이용하여 장애물을 회피할 수 있는 최적의 경로를 탐색 결과를 시뮬레이션으로 구현
· RVIZ
· Frenet Optimal Path Planning
· Stanley method
· Pure Pursuit
jsg921019@gmail.com
Email me